









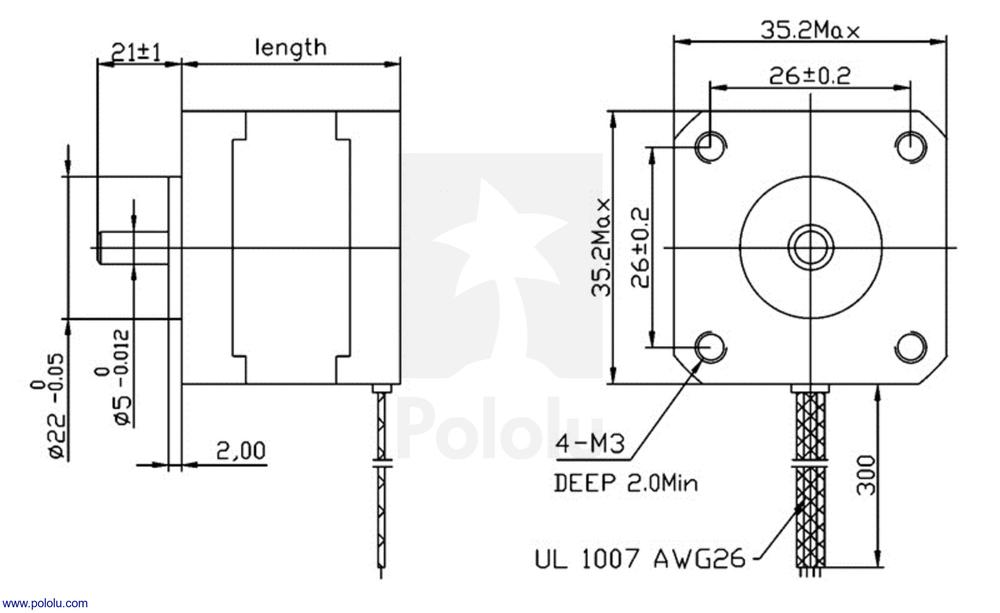
Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 35 × 28 mm, 10 V, 0,5 A/vaihe
Kuvaus
Pololu hybridi bipolaarinen askelmoottori soveltuu monenlaisiin sovelluksiin. Työskenteletpä sitten 3D-tulostimen, CNC-reitittimen tai robottikäsivarren parissa, tämä moottori tarjoaa tarvittavan tarkkuuden ja tehon. Sen kompakti 35 x 28 mm koko varmistaa, että se sopii saumattomasti malleihin suorituskyvystä tinkimättä.
Yksi tämän moottorin tärkeimmistä eduista on sen korkea tarkkuus. 200 askelta kierrosta kohti, joten voit luottaa siihen tarkan liikkeen ja paikantamisen suhteen. Tämä tekee siitä erinomaisen valinnan projekteihin, joissa tarkkuus on ensiarvoisen tärkeää.
Lisäksi moottori erottuu edukseen vaikuttavalla 1kg-cm vääntömomentilla. Tämä tarkoittaa, että se kestää raskaampia kuormia ja kestää ulkoisia voimia, mikä varmistaa projektisi sujuvan ja tehokkaan toiminnan. Näin vahvalla suorituskyvyllä Pololu hybridi bipolaarinen askelmoottori on todella luotettava valinta insinööritarpeisiisi.
Ominaisuudet
| Brändi | Pololu |
| Malli | 1208 |
Toimitetaan 5 - 7 päivässä
 Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 35 × 28 mm, 10 V, 0,5 A/vaihe Toimitetaan 5 - 7 päivässä € 43,50
Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 35 × 28 mm, 10 V, 0,5 A/vaihe Toimitetaan 5 - 7 päivässä € 43,50 Vaihtoehtoiset tuotteet
- Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 35 × 36 mm, 2,7 V, 1 A/vaihe € 50,05 Katso tuote
- Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 42 × 38 mm, 2,8 V, 1,7 A/vaihe € 50,05 Katso tuote
- Pololu Askelmoottori: yksinapainen/kaksinapainen, 200 askelta/kierros, 57 × 41 mm, 5,7 V, 1 A/vaihe € 80,65 Katso tuote
- Pololu Askelmoottori: yksinapainen/kaksinapainen, 200 askelta/kierros, 42×48 mm, 4V, 1,2 A/vaihe € 61,- Katso tuote
- Pololu Askelmoottori: yksinapainen/kaksinapainen, 200 askelta/kierros, 57 × 56 mm, 7,4 V, 1 A/vaihe € 106,90 Katso tuote
- Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 20×30 mm, 3,9 V, 0,6 A/vaihe € 58,55 Katso tuote
- Pololu Askelmoottori: yksinapainen/kaksinapainen, 200 askelta/kierros, 57 × 76 mm, 8,6 V, 1 A/vaihe € 133,10 Katso tuote
- Pololu Askelmoottori: yksinapainen/kaksinapainen, 200 askelta/kierros, 57 × 56 mm, 3,6 V, 2 A/vaihe € 106,90 Katso tuote
- Pololu Askelmoottori: yksinapainen/kaksinapainen, 200 askelta/kierros, 57×76 mm, 4,5 V, 2 A/vaihe € 133,10 Katso tuote
Asiakkaiden kysymyksiä
asiakkaiden arvostelut
Suositellut tuotteet
- Vähennetty Varastossa -50 % Pololu A4988 askelmoottorin ohjainkannatin € 13,05 € 6,55 Katso tuote
- Adafruit Mono-koteloitu kaiutin - 3W 4 ohm € 8,60 Katso tuote
- Pololu QTR-8RC Heijastusanturiryhmä € 19,80 Katso tuote
- Adafruit Kaiutin - 40 mm halkaisija - 4 ohmia 5 wattia € 10,15 Katso tuote
- FEETECH Mini Servo FT1117M-FB paikkapalautteella € 13,10 Katso tuote
- DFRobot Painovoima: Joustava Piezo Film -värähtelyanturi € 11,45 Katso tuote
- Vähennetty 2 sets Varastossa -50 % Opencircuit DC-pistoke uros + naarassarja - 5,5 mm x 2,1 mm riviliittimeen € 2,50 € 1,25 Katso tuote
- Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Sininen € 13,50 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Limen vihreä € 10,15 € 5,10 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Punainen € 10,95 € 5,50 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Keltainen € 10,95 € 5,50 Katso tuote
- Vähennetty Varastossa -51 % Sparkfun Äänikaapeli TRS - 1 m € 4,05 € 2,- Katso tuote
- Arduino ® Nano ESP32 otsikoineen € 27,50 Katso tuote
- Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 42 × 38 mm, 2,8 V, 1,7 A/vaihe € 50,05 Katso tuote
- Raspberry Pi 5 - 8GB € 217,25 Katso tuote
- Vähennetty Varastossa -50 % Pololu 3.3V Step-Up jännitteensäädin U1V10F3 € 10,15 € 5,10 Katso tuote
- Vähennetty Varastossa -50 % Pololu Wheel 32×7mm pari - valkoinen € 6,50 € 3,25 Katso tuote
- Vähennetty Varastossa -50 % Pololu 3.3V Step-Up jännitteensäädin U1V11F3 € 11,60 € 5,80 Katso tuote
- Vähennetty Varastossa -50 % Pololu 5 V:n nosto-/alennusjännitesäädin S18V20F5 € 43,70 € 21,85 Katso tuote
- Vähennetty Varastossa -50 % Pololu 5V Step-Up jännitteensäädin U3V16F5 € 10,15 € 5,10 Katso tuote
- Vähennetty Varastossa -50 % Pololu Nauhakaapeli Premium-hyppyjohdot 10-värinen FF 6" (15 cm) € 4,20 € 2,10 Katso tuote
- Vähennetty 3 pieces Varastossa -50 % Pololu Ruuviton liitinlohko: 3-nastainen, 0,1 tuuman jako, sivusisääntulo (3-pakkaus) € 3,70 € 1,85 Katso tuote
- Vähennetty Varastossa -50 % Pololu Kierretty johto: punainen, 28 AWG, 90 jalkaa € 14,55 € 7,30 Katso tuote
- Vähennetty Varastossa -50 % Pololu 3,3 V, 500 mA:n alennusjännitesäädin D24V5F3 € 13,05 € 6,55 Katso tuote
- Vähennetty 5 pieces Varastossa -49 % Pololu Mini Painikekytkin: PCB-kiinnitys, 2-nastainen, SPST, 50mA (5 kpl) € 3,05 € 1,55 Katso tuote
- Vähennetty Varastossa -50 % Pololu Mini-liukukytkin: 3-nastainen, SPDT, 0,3A (3-pakkaus) € 3,50 € 1,75 Katso tuote
- Vähennetty Varastossa -50 % Pololu 5V, 500mA:n alennusjännitesäädin D24V5F5 € 13,05 € 6,55 Katso tuote
- Vähennetty Varastossa -50 % Pololu 0,100" (2,54 mm) Breakaway-urosotsikko: 1 × 40-nastainen, suora, valkoinen € 1,60 € 0,80 Katso tuote
- Vähennetty Varastossa -50 % Pololu Säikeinen lanka: Valkoinen, 20 AWG, 40 jalkaa € 17,45 € 8,75 Katso tuote
- Vähennetty Varastossa -50 % Pololu 9V, 1A alennusjännitesäädin D24V10F9 € 18,90 € 9,45 Katso tuote
Viimeksi katsotut tuotteet
- Pololu Askelmoottori: Bipolaarinen, 200 askelta/kierros, 35 × 28 mm, 10 V, 0,5 A/vaihe € 43,50 Katso tuote
- Vähennetty 2 pieces Varastossa -50 % Pololu Micro Metal Gear Motor Bracket Extended pari - 2 kpl € 7,25 € 3,65 Katso tuote
- Logitech K400 | Langaton näppäimistö kosketuslevyllä | QWERTY € 51,- Katso tuote