









Pololu Dual G2 High Power -moottoriohjain 18v18 Raspberry Pi:lle (koottu)
Kuvaus Vasen Liitteet
Tällä lisälevyllä on helppo ohjata kahta suuritehoista tasavirtamoottoria Raspberry Pi:llä. Sen kaksi erillistä MOSFET H-siltaa tukevat laajaa 6,5 V - 30 V toiminta-aluetta ja ovat riittävän tehokkaita tuottamaan jatkuvaa 18 A ilman jäähdytyselementtiä. Ohjaimet tarjoavat perusvirranrajoitustoiminnot, ja ne hyväksyvät ultraäänen PWM-taajuudet hiljaisemman toiminnan takaamiseksi. Oletusnastakartoitukset helpottavat aloittamista, mutta niitä voidaan mukauttaa erikoistuneempia sovelluksia varten. Tämä versio toimitetaan täysin koottuna, jossa on juotetut liittimet.
Pienin käyttöjännite kaikissa neljässä versiossa on 6,5 V, kun taas suurimmat käyttöjännitteet on annettu yllä olevassa taulukossa. Kortissa on myös integroitu 5 V, 2,5 A:n kytkentäsäädin, jota voidaan käyttää syöttämään virtaa Raspberry Pi:lle, johon se on kytketty, mikä mahdollistaa käytön yhdestä virtalähteestä.
Ohjaimen oletuskokoonpano käyttää kuutta GPIO-nastaa ohjaamaan moottoriajureita, hyödyntäen Raspberry Pi:n laitteiston PWM-lähtöjä, ja se käyttää kahta lisänastaa lukemaan tilalähtöjä ohjaimista. Pin-kartoitukset voidaan kuitenkin mukauttaa, jos oletusasetukset eivät ole käteviä, ja virrantunnistuksen ja -rajoituksen nastat ovat käytettävissä kortilla kehittyneempiä sovelluksia varten.
Levy vastaa Raspberry Pi HAT (Hardware Attached on Top) mekaanisia määrityksiä, vaikka se ei täytä kaikkia HAT-spesifikaatioita ID EEPROMin puuttumisen vuoksi. (Jalanjälki oman EEPROMin lisäämistä varten on saatavilla sovelluksiin, joissa se olisi hyödyllinen; SDA-, SCL- ja WP-vedot ovat saatavilla.) Tätä laajennuskorttia ei ole käytännöllistä käyttää alkuperäisen Raspberry Pi -mallin A tai mallin kanssa. B niiden pinout- ja muototekijöiden erojen vuoksi.
Nämä kaksoismoottoriohjaimet ovat saatavilla myös Arduino-suojaina. Harkitse suuritehoisia moottoriajureitamme, jos haluat käyttää kompaktimpia yksikanavaisia versioita. Raspberry Pi:lle suunniteltuja pienempiä, pienempitehoisia ja halvempia vaihtoehtoja varten harkitse Dual MC33926 Motor Driver for Raspberry Pi, Dual MAX14870 Motor Driver for Raspberry Pi ja DRV8835 Dual Motor Driver for Raspberry Pi.
Kaikille versioille yhteiset ominaisuudet
- PWM-toiminta jopa 100 kHz
- Moottorin merkkivalot näyttävät, mitä lähdöt tekevät, vaikka moottoria ei ole kytketty
- Integroitu 5 V, 2,5 A:n kytkentäjännitesäädin antaa virtaa Raspberry Pi -pohjalle yhdestä virtalähteestä
- Python-kirjasto helpottaa tämän kortin käytön aloittamista moottoriohjaimen laajennuskorttina
- GPIO-nastakartoitukset voidaan mukauttaa, jos oletuskartoitukset eivät ole käteviä
- Virrantunnistus- ja rajoitusnastat ovat esillä edistyksellistä käyttöä varten
- Käänteisjännitesuoja
- Alijännitteen sammutus
- Oikosulkusuojaus
Tämän tuotteen tiedot #3751
- Käyttöjännite: 6,5 V - 30 V (absoluuttinen maksimi; ei tarkoitettu käytettäväksi 24 V akkujen kanssa)
- Lähtövirta: 18 A jatkuva
- Aktiivinen virranrajoitus (katkaisu) likimääräisellä oletuskynnyksellä 50 A (voidaan säätää pienemmäksi)
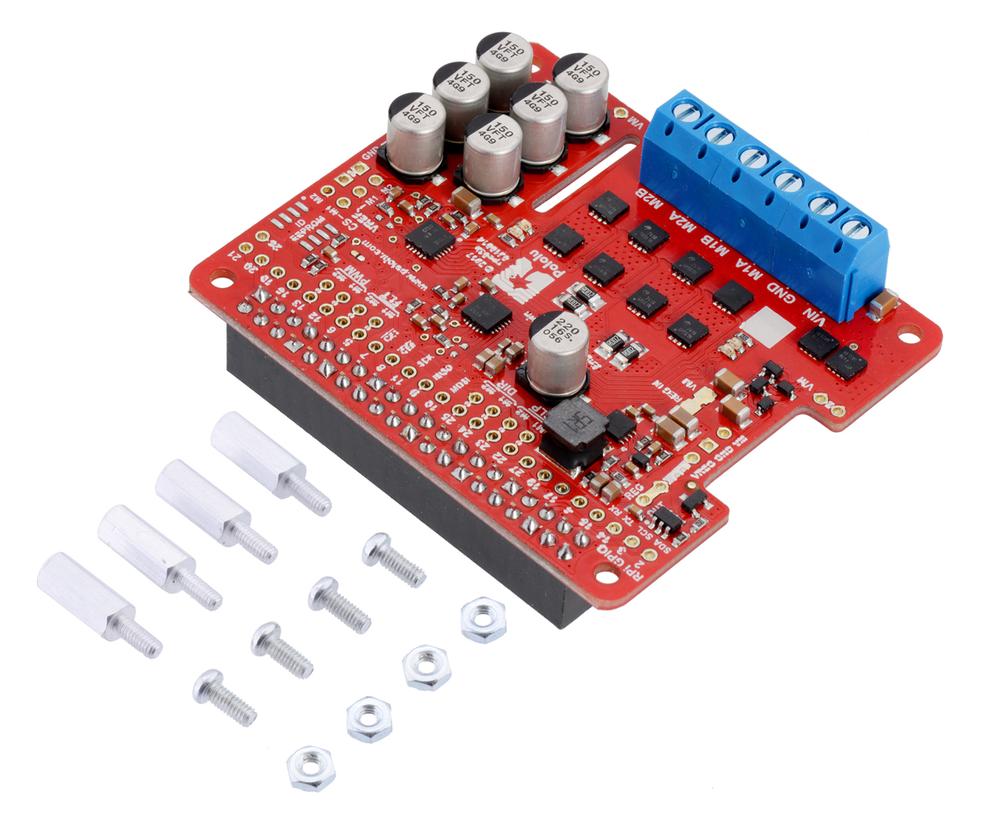
Tämä versio 18v18 moottorinkuljettaja on täysin koottu, jossa on 2 × 20-nastainen 0,1 tuuman naarasliitin (Raspberry Pi -liitäntää varten) ja kuusinapainen 5 mm:n riviliittimien nauha (kortin teho- ja moottorilähtöjä varten). Se erotetaan muista versioista sen punainen PCB ja numero 150 kuuden korkean hopeisen elektrolyyttikondensaattorin päällä levyn kulmassa. (Katso kohdasta #3750 sarjaversio, jossa on liittimet, mutta ei juotettu.)
Mukana on neljä M2.5-kiinnitystä (pituus 11 mm), ruuveja ja muttereita, jotka kiinnittävät levyn Raspberry Pi:hen oikealle korkeudelle GPIO-liittimelle.
Oikosulkulohkoja ja 0,1″ urosotsikoita (ei sisälly) voidaan käyttää tekemään joitain edistyneempiä valinnaisia muutoksia korttiin, kuten säätönastat uudelleen kartoittamaan.
Moottoriohjain sisältää kuusi 100 μF tai 150 μF elektrolyyttitehokondensaattoria ja lisäkondensaattoreita on mahdollista lisätä (esim. pitkien virtajohtojen kompensoimiseksi tai teholähteen vakauden lisäämiseksi). Ylimääräisiä tehokondensaattoreita ei yleensä tarvita, eikä tämän moottoriohjaimen mukana toimiteta ylimääräisiä kondensaattoreita.
Raspberry Pi on ei sisälly.
Tehoa
Sopiva moottorin virtalähde tulee kytkeä moottoriohjaimen suuriin VIN- ja GND-tyynyihin. Kortissa on käänteisjännitesuojapiiri, joka auttaa estämään vaurioita, jos moottorin virransyöttö kytketään taaksepäin. Käänteissuojattua tulojännitettä voidaan käyttää muissa piireissä kahden VM-merkinnän kautta kortin vasemmalla puolella. Oletusarvoisesti moottorin virtalähde syöttää myös 5 V, 2,5 A:n kytkentäsäädintä, joka antaa virran kytkettyyn Raspberry Pi:hen.
Tämän levyn ihanteellinen diodipiiri estää käänteistä virtaa virtaamasta moottorin ohjainkortin 5 V:n syöttöön, jos Raspberry Pi saa erillisen virran (esimerkiksi USB-virtaliittimen kautta). Raspberry Pi 3 Model B+:sta alkaen Raspberry Pi:n USB-virtatulossa ei kuitenkaan ole vastaavaa ihanteellista diodipiiriä, joten ohjainkortti voi syöttää takaisin USB-virtasovittimen Raspberry Pi:n kautta. Tästä syystä emme suosittele ulkoisen USB-virran kytkemistä Raspberry Pi -laitteeseen, kun se saa virtaa moottoriohjaimen kautta.
Takaisinsyöttö ei ole ongelma vanhemmissa Raspberry Pi -versioissa, joiden USB-virtatulossa on diodipiiri. Pi 3 B+:ta edeltävillä Raspberry Pi -versioilla on turvallista liittää toinen virtalähde Raspberry Pi -laitteeseen sen USB-liittimen kautta, kun moottorin ajuri on kytkettynä ja siihen on kytketty virta.
Jos haluat antaa virran Raspberry Pi:lle erikseen, säädin voidaan irrottaa leikkaamalla levylle kaksi näkyvää jälkeä: toinen pinta-asennuslevyjen väliin, joissa on merkinnät "VM" ja "REG IN", ja toinen kahden nastan väliin " REG OUT” -tarra, kuten oikealla näkyy. 24v14- ja 24v18-versioissa säätimen irrottaminen nostaa kortin absoluuttisen maksimikäyttöjännitteen 40 V:iin.
Moottorin ohjausvaihtoehdot
Kun PWM-nasta pidetään alhaalla, molemmat moottorin lähdöt pidetään alhaalla (jarrutoiminto). Kun PWM korkea, moottorin lähtöjä ohjataan DIR-tulon mukaan. Tämä mahdollistaa kaksi toimintatilaa: merkkisuuruus, jossa PWM-käyttöjakso ohjaa moottorin nopeutta ja DIR ohjaa suuntaa, ja lukittu antifaasi, jossa pulssinleveysmoduloitu signaali syötetään DIR-nastan kanssa. PWM pysyi korkealla.
Lukitun vaiheen vastaisessa toiminnassa pieni käyttösuhde ajaa moottoria yhteen suuntaan ja korkea käyttösuhde ajaa moottoria toiseen suuntaan; 50 %:n käyttöaste sammuttaa moottorin. Onnistunut lukitun vastavaiheen toteutus riippuu moottorin induktanssista ja kytkentätaajuudesta, jotka tasoittavat virtaa (esim. virran nollaaminen 50 %:n käyttöjakson tapauksessa), joten korkea PWM-taajuus saattaa olla tarpeen.
PWM-taajuus
Moottoriohjain tukee jopa 100 kHz:n PWM-taajuuksia, mutta huomaa, että ajurin kytkentähäviöt ovat verrannollisia PWM-taajuuteen. Tyypillisesti noin 20 kHz on hyvä valinta merkkisuuruuskäyttöön, koska se on tarpeeksi korkea ollakseen ultraääni, mikä johtaa hiljaisempaan toimintaan.
PWM-nastan pulssin on oltava korkea vähintään noin 0,5 µs, ennen kuin lähdöt kytkeytyvät päälle vastaavaksi ajaksi (lyhyempi tulopulssi ei aiheuta muutosta lähtöihin), joten matalat käyttöjaksot eivät ole käytettävissä korkeilla taajuuksilla. . Esimerkiksi 100 kHz:llä pulssijakso on 10 µs ja pienin nollasta poikkeava käyttösuhde on 0,5/10 eli 5 %.
Vikaolosuhteet
Moottoriohjain voi havaita useita ilmoittamiaan vikatiloja ajamalla FLT-nastan matalalle; tämä on avoimen valumisen lähtö, joka tulee vetää järjestelmäsi logiikkajännitteeseen. Havaittavia vikoja ovat lähtöjen oikosulut, alijännite ja ylilämpötila. Kaikki viat estävät moottorin lähdöt, mutta eivät ole lukittuja, mikä tarkoittaa, että kuljettaja yrittää jatkaa toimintaansa, kun vikatila on poistettu (tai muutaman millisekunnin viiveen jälkeen, jos kyseessä on oikosulkuvika). Ylikuumenemisvika antaa heikon osoituksen siitä, että kortti on liian kuuma, mutta se ei osoita suoraan MOSFETien lämpötilaa, jotka yleensä ylikuumenevat ensimmäisinä, joten sinun ei pitäisi luottaa tähän vikaan ylikuumenemisen estämiseksi. - lämpötilaolosuhteet.
Pinnien uudelleenkartoitus
Kaikki Raspberry Pi:n GPIO-nastat on jaettu numeroitujen läpivientiaukojen riviin 40-nastaisen GPIO-liittimen alapuolelle. Jokainen levyn käyttämä GPIO-nasta on liitetty tältä riviltä vastaavaan moottoriohjaimen nastaan levyn yläpuolella olevalla reikäparin ylittävällä viivalla. Jos haluat kartoittaa jonkin näistä moottoriohjaimen nastoista uudelleen, voit leikata sen jäljen veitsellä ja vetää sitten johdon alemmasta reiästä uuteen GPIO-nastaan.
Huomaa, että oletusnastakartoitukset valittiin siten, että Raspberry Pi:n oletusarvoiset GPIO-vedot ja -vedot vastaavat moottorin ajurin nastat ovat tai pitäisi vetää (ylös SF, alas muille); Jos yhdistät moottorin ohjaimen nastat uudelleen kiinnittämättä huomiota tähän, saatat kohdata ongelmia, kun nastoja vedetään väärään suuntaan. Katso Raspberry Pi -dokumentaatio saadaksesi lisätietoja oletusarvoisista GPIO-tiloista.
Virran tunnistus ja rajoitus
Moottoriohjain paljastaa virran tunnistavat ja rajoittavat nastat, joita ei ole kytketty Raspberry Pi:hen, mutta niihin pääsee käsiksi omien läpimenevien reikien kautta, jos haluat käyttää niitä edistyneemmässä sovelluksessa.
Kuljettaja pystyy rajoittamaan moottorin virtaa virrankatkaisun avulla: kun moottorin käyttövirta saavuttaa asetetun kynnyksen, kuljettaja siirtyy jarrutustilaan (hidas vaimennus) noin 25 μs:ksi ennen kuin se käyttää moottoria uudelleen. Tämä tekee ohjaimen käytöstä käytännöllisempää moottorin kanssa, joka saattaa kuluttaa vain muutaman ampeerin ajon aikana, mutta voi vetää monta kertaa niin paljon (kymmeniä ampeeria) käynnistettäessä.
Tällä kortilla (18v18) nimellisvirran rajoituskynnys on oletusarvoisesti asetettu noin 50 A:iin. Voit alentaa kunkin moottorikanavan rajaa kytkemällä ylimääräisen vastuksen VREF-nastan ja viereisen GND-nastan väliin; alla oleva kaavio näyttää kuinka virtaraja liittyy VREF-vastuksen arvoon. Esimerkiksi 100 kΩ:n vastuksen lisääminen VREF:n ja GND:n väliin laskee virtarajan noin 29 A:iin. Huomaa, että virranrajoituskynnys ei ole kovin tarkka ja se on vähemmän tarkka erityisen matalilla asetuksilla (käyrän katkoviivaosuus osoittaa). .
Kuljettajan virran tunnistusnastat, merkintä CS, lähtöjännitteet ovat verrannollisia moottorin virtoihin H-siltojen ajaessa. Tämän version lähtöjännite on noin 20 mV/A plus pieni offset, joka on tyypillisesti noin 50 mV.
Jokainen CS-lähtö on aktiivinen vain, kun vastaava H-silta on ajotilassa; se ei ole aktiivinen (matala), kun kanava on jarrutilassa (hidas vaimennus), mikä tapahtuu, kun PWM-tulo on alhainen tai kun virranrajoitus on aktiivinen. Virta kiertää edelleen moottorin läpi, kun kuljettaja alkaa jarruttaa, mutta CS-nastan jännite ei heijasta tarkasti moottorin virtaa jarrutustilassa. Moottorin ohjain käyttää sisäisesti CS-jännitettä, joten ohjaimen toiminnan häiritsemisen välttämiseksi sinun ei pitäisi lisätä tähän nastaan kondensaattoria tai kytkeä kuormaa, joka kuluttaa siitä enemmän kuin muutaman mA.
Tosimaailman vallan hajautusnäkökohdat
MOSFETit pystyvät käsittelemään suuria virtapiikkejä lyhyitä kestoja (esim. 100 A muutaman millisekunnin ajan), ja kuljettajan virrankatkaisu pitää keskivirran asetetun rajan alapuolella. Huippuarvot koskevat nopeita transientteja (esim. kun moottori käynnistetään ensimmäisen kerran), ja jatkuva teho riippuu useista olosuhteista, kuten ympäristön lämpötilasta. Moottorin PWM lisää taajuuteen verrannollista lisälämmitystä. Todellinen toimitettava virta riippuu siitä, kuinka hyvin pystyt pitämään moottoriohjaimen viileänä. Ohjaimen painettu piirilevy on suunniteltu ottamaan lämpö pois MOSFETeistä, mutta suorituskykyä voidaan parantaa lisäämällä jäähdytyselementti tai ilmavirta. Suurvirtaasennuksissa moottorin ja virtalähteen johdot tulee myös juottaa suoraan sen sijaan, että ne menevät mukana toimitettujen riviliittimien läpi, joiden nimellisjännite on enintään 16 A.
Varoitus: Tällä moottoriohjaimella ei ole ylilämpötilan katkaisua. Ylilämpötila tai ylivirtatila voi aiheuttaa pysyvä vaurio moottorin kuljettajalle. Voit harkita joko ohjaimen integroidun virranmittauslähdön (ulkoisen ADC:n kanssa) tai ulkoisen virta-anturin käyttämistä virrankulutuksen seuraamiseen.
Ominaisuudet
| Brändi | Pololu |
| Malli | 3751 |
Toimitetaan 5 - 7 päivässä
 Pololu Dual G2 High Power -moottoriohjain 18v18 Raspberry Pi:lle (koottu) Toimitetaan 5 - 7 päivässä € 104,45
Pololu Dual G2 High Power -moottoriohjain 18v18 Raspberry Pi:lle (koottu) Toimitetaan 5 - 7 päivässä € 104,45 Vaihtoehtoiset tuotteet
- Pololu Tehokas yksinkertainen moottoriohjain G2 24v19 € 149,80 Katso tuote
- Pololu Dual G2 High Power -moottoriohjain 24v14 Raspberry Pi:lle (osittainen sarja) € 104,45 Katso tuote
- Pololu Dual G2 High Power -moottoriohjain 18v18 Raspberry Pi :lle (osittainen sarja) € 97,65 Katso tuote
- Pololu Dual G2 High Power Motor Driver 24v18 Shield Arduinolle € 145,45 Katso tuote
- Pololu Tehokas yksinkertainen moottoriohjain G2 24v12 (liittimet juotetut) € 128,55 Katso tuote
- Pololu Tehokas yksinkertainen moottoriohjain G2 18v15 € 186,50 Katso tuote
- Pololu Dual G2 High Power -moottoriohjain 24v18 Raspberry Pi:lle (osittainen sarja) € 131,80 Katso tuote
- Pololu G2 High Power -moottoriohjain 18v25 € 79,90 Katso tuote
- Pololu Jrk G2 21v3 USB-moottoriohjain, jossa on palaute (liittimet juotetut) € 79,90 Katso tuote
- Pololu Tehokas yksinkertainen moottoriohjain G2 18v25 € 150,- Katso tuote
- Pololu Jrk G2 24v21 USB-moottoriohjain, jossa palaute € 206,90 Katso tuote
- Pololu Dual G2 High Power -moottoriohjain 24v14 Raspberry Pi :lle (koottu) € 111,30 Katso tuote
- Pololu G2 suuritehoinen moottoriohjain 24v13 € 63,50 Katso tuote
- Pololu Jrk G2 18v19 USB-moottoriohjain, jossa on palaute € 152,25 Katso tuote
- Pololu Tehokas yksinkertainen moottoriohjain G2 24v12 € 186,50 Katso tuote
- Pololu Dual G2 High-Power Motor Driver 18v22 Shield Arduinolle € 145,45 Katso tuote
- Pololu Dual G2 High Power Motor Driver 18v18 Shield Arduinolle € 104,45 Katso tuote
- Pololu G2 High Power -moottoriohjain 24v21 € 79,90 Katso tuote
- Pololu Dual G2 High-Power Motor Driver 24v14 Shield Arduinolle € 111,30 Katso tuote
- Pololu Tehokas yksinkertainen moottoriohjain G2 18v15 (liittimet juotetut) € 128,40 Katso tuote
- Pololu Jrk G2 18v27 USB-moottoriohjain, jossa palaute € 136,20 Katso tuote
- Pololu Dual G2 High Power -moottoriohjain 18v22 Raspberry Pi :lle (osittainen sarja) € 131,80 Katso tuote
- Pololu G2 High Power -moottoriohjain 18v17 € 63,50 Katso tuote
- Pololu Jrk G2 24v13 USB-moottoriohjain, jossa palaute € 152,25 Katso tuote
Asiakkaiden kysymyksiä
asiakkaiden arvostelut
- Vähennetty Varastossa -50 % Pololu DRV8838 Yksiharjattu DC-moottorin ohjainkannatin € 7,20 € 3,60 Katso tuote
- Vähennetty Varastossa -50 % Pololu 3.3V Step-Up jännitteensäädin U1V10F3 € 10,10 € 5,05 Katso tuote
- Vähennetty Varastossa -50 % Pololu 3,3 V, 500 mA:n alennusjännitesäädin D24V5F3 € 13,- € 6,50 Katso tuote
- Vähennetty Varastossa -50 % Pololu 5 V:n nosto-/alennusjännitesäädin S18V20F5 € 43,55 € 21,80 Katso tuote
- Vähennetty Varastossa -50 % Pololu 5V Step-Up jännitteensäädin U3V16F5 € 10,10 € 5,05 Katso tuote
- Vähennetty Varastossa -49 % Pololu Nauhakaapeli Premium-hyppyjohdot 10-värinen FF 6" (15 cm) € 4,15 € 2,10 Katso tuote
- Vähennetty 3 pieces Varastossa -50 % Pololu Ruuviton liitinlohko: 3-nastainen, 0,1 tuuman jako, sivusisääntulo (3-pakkaus) € 3,70 € 1,85 Katso tuote
- Vähennetty Varastossa -50 % Pololu Kierretty johto: punainen, 28 AWG, 90 jalkaa € 14,45 € 7,25 Katso tuote
- Vähennetty Varastossa -50 % Pololu Wheel 32×7mm pari - valkoinen € 6,50 € 3,25 Katso tuote
- Vähennetty 5 pieces Varastossa -49 % Pololu Mini Painikekytkin: PCB-kiinnitys, 2-nastainen, SPST, 50mA (5 kpl) € 3,05 € 1,55 Katso tuote
- Vähennetty Varastossa -49 % Pololu Mini-liukukytkin: 3-nastainen, SPDT, 0,3A (3-pakkaus) € 3,45 € 1,75 Katso tuote
- Vähennetty Varastossa -50 % Pololu 5V, 500mA:n alennusjännitesäädin D24V5F5 € 13,05 € 6,50 Katso tuote
- Vähennetty Varastossa -50 % Pololu 0,100" (2,54 mm) Breakaway-urosotsikko: 1 × 40-nastainen, suora, valkoinen € 1,60 € 0,80 Katso tuote
- Vähennetty Varastossa -50 % Pololu Säikeinen lanka: Valkoinen, 20 AWG, 40 jalkaa € 17,35 € 8,70 Katso tuote
- Vähennetty Varastossa -49 % Pololu Nylon välilevy: pituus 4 mm, ulkohalkaisija 4 mm, sisähalkaisija 2,7 mm (50 kpl) € 4,85 € 2,45 Katso tuote