









Adafruit N20 DC-moottori magneettikooderilla - 6V ja välityssuhde 1:298
Kuvaus
Robotiikkaprojektin ensimmäinen vaihe on moottorin pyörittämisen saaminen. Kaikki moottorit eivät pyöri samalla nopeudella jännitteen, ympäristön ja valmistuksen vaihteluiden vuoksi. Moottorin nopeuden määrittämiseen kuuluu enkooderipyörän käyttö optisella tai magneettisella laskurilla kierrosten laskemiseksi.
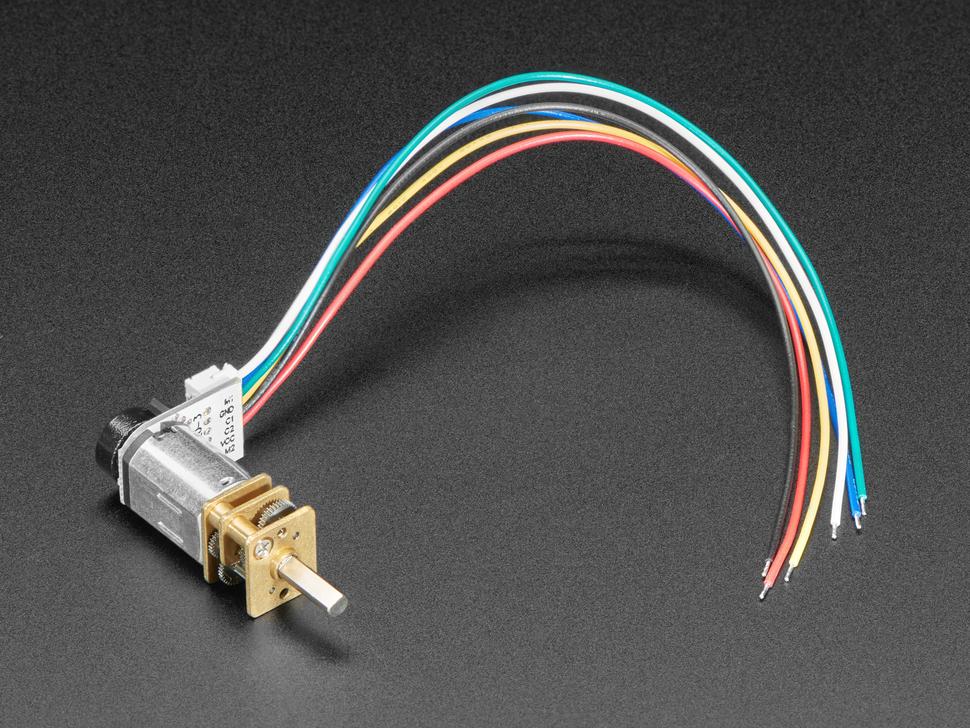
Tämä moottori yksinkertaistaa prosessia kiinnitetyn magneettipyörän ja kahden Hall-anturin ansiosta, mikä poistaa monimutkaisen johdotuksen tarpeen. Se on kompakti, sopii N20-vakiokokoon ja toimii tehokkaasti 4,5–6 V tasavirralla. Liitännät ovat suoraviivaisia: valkoinen ja punainen johto moottorin käyttöön, PWM-tuki nopeuden säätöön, sininen johto maadoitukseen ja musta johto virtaan. Keltainen ja vihreä johto tarjoavat enkooderin lähdöt.
Esimerkki Arduino luonnoksesta on saatavilla, ja se on sovellettavissa muihin ohjelmointikieliin. Se käsittelee keskeytysten laskemista ja nopeuden laskentaa välityssuhteella 1:298. Moottori käyttää nimellistehoa 6 V ja kuluttaa noin 100 mA (200 mA pysähdyksissä), ja välityssuhteen muuttaminen vaikuttaa vääntömomenttiin ja kierroslukuun, ei virrankulutukseen.
Ominaisuudet
| Brändi | Adafruit |
| Malli | 4641 |
Toimitetaan 10 - 12 päivässä
 Adafruit N20 DC-moottori magneettikooderilla - 6V ja välityssuhde 1:298 Toimitetaan 10 - 12 päivässä € 20,25
Adafruit N20 DC-moottori magneettikooderilla - 6V ja välityssuhde 1:298 Toimitetaan 10 - 12 päivässä € 20,25 Asiakkaiden kysymyksiä
asiakkaiden arvostelut
- Vähennetty Varastossa -49 % Adafruit Valkoinen LED-taustavalomoduuli - Pieni 12mm x 40mm € 2,85 € 1,45 Katso tuote
- Vähennetty Varastossa -50 % Adafruit JST-PH 2-nastainen SMT Oikeakulmainen Breakout Board € 2,20 € 1,10 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Minimetallikaiutin langoilla - 8 ohm 0,5W € 2,85 € 1,45 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Pinottavat liittimet Feather-liittimille - 12- ja 16-nastaiset naarasliittimet € 1,80 € 0,90 Katso tuote
- Vähennetty 3 pieces Varastossa -50 % Adafruit LED-filamentti - 3V 26mm pitkä - Lämmin valkoinen 3 kpl € 6,60 € 3,30 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Yksisuuntainen joustava LED-filamentti - 3V 25mm pitkä - Vihreä € 3,65 € 1,85 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Keltainen € 10,85 € 5,40 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Ultimate GPS HAT Raspberry Pi A+/B+/Pi 2/3/4/Pi 5:lle € 43,25 € 21,65 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Vedenpitävä polarisoitu 4-johtiminen kaapelisarja € 3,60 € 1,80 Katso tuote
- Vähennetty Varastossa -50 % Adafruit IR-sädetunnistin premium-johtoliittimillä - 5 mm:n LEDit € 8,60 € 4,30 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Kaiutin - 3" Halkaisija - 4 Ohm 3 Watt € 2,85 € 1,45 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Vedenpitävä DC-virtajohtosarja - 5,5/2,1 mm € 3,65 € 1,85 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Punainen € 10,85 € 5,45 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Kudottu johtava kangas - 20 cm neliö € 7,15 € 3,60 Katso tuote
- Vähennetty 10 pieces Varastossa -50 % Adafruit Break-away 0,1" 36-nastainen nauhallinen urosotsikko - Rainbow Combo 10 Pack € 7,15 € 3,60 Katso tuote