









Adafruit N20 DC-moottori magneettikooderilla - 6V ja välityssuhde 1:100
Kuvaus
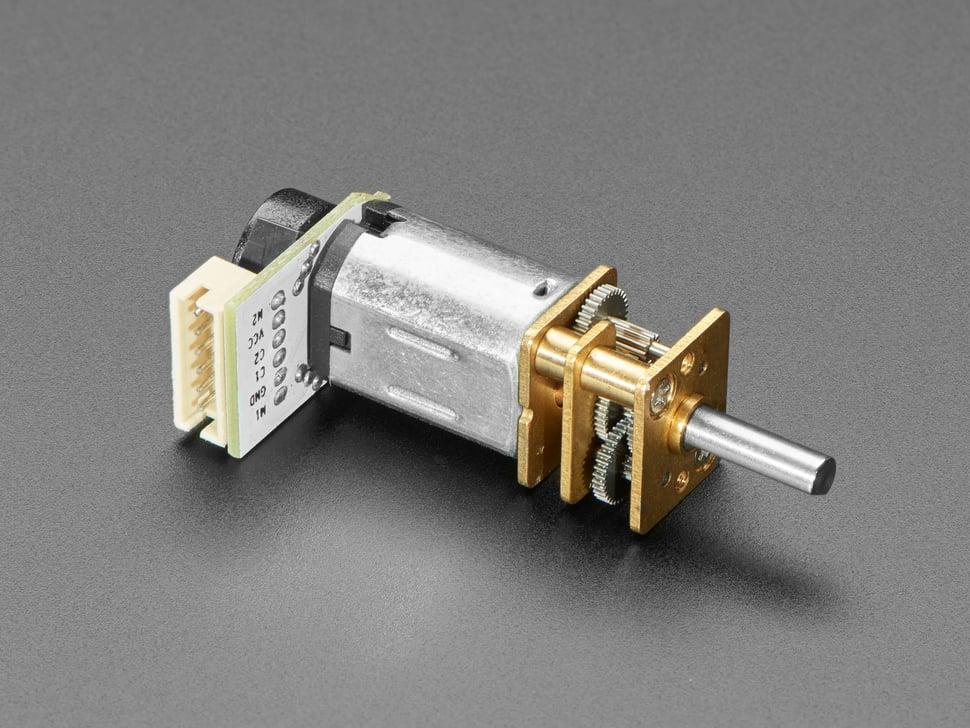
Robotiikkaprojektien ensimmäinen vaihe on moottorin pyörittämisen saaminen. Kaikki moottorit eivät kuitenkaan toimi samalla nopeudella, edes identtisillä osanumeroilla, jännitteen, ympäristön ja valmistuksen vaihteluiden vuoksi. Seuraava ratkaiseva vaihe on moottorin nopeuden määrittäminen, haastava tehtävä, jota yksinkertaistetaan lisäämällä enkooderipyörä ja optinen tai magneettinen laskuri. Moottorin pyöriessä enkooderipyörä pyörii, jolloin laskuri havaitsee jokaisen puolan ja mahdollistaa nopeuslaskelmat. Paranna toiminnallisuutta lisäämällä toinen laskuri suunnan määrittämiseksi.
Tämä moottori virtaviivaistaa prosessia integroidulla magneettipyörällä ja kahdella Hall-anturilla. Kompaktina N20-kokoisena moottorina se toimii sujuvasti 4,5–6 V tasavirralla. Kytke valkoinen ja punainen johto moottoriohjaimeen säätääksesi nopeutta ja suuntaa PWM:n ja H-sillan avulla. Sininen johto kytketään mikrokontrollerin maadoitusnastaan, kun taas musta johto sopii mihin tahansa 3–5 V tasavirtalähteeseen. Hall-ulostuloihin pääsee keltaisen ja vihreän johdon kautta.
Arduino esimerkkiluonnos on annettu, mutta sitä voidaan soveltaa muillekin ohjelmointikielille. Se sisältää yhden enkooderin nastan keskeytyksen, viimeisen keskeytyksen jälkeisen ajan laskemisen ja laskenta-ajan kertomisen 14 laskulla kierrosta kohden sekä välityssuhteen. Tässä moottorissa on 1:100 välityssuhde, se käyttää 6 V nimellistehoa ja kuluttaa noin 100 mA (200 mA pysähdyksissä). Välityssuhde vaikuttaa vääntömomenttiin ja kierroslukuun, mutta ei virrankulutukseen.
Ominaisuudet
| Brändi | Adafruit |
| Malli | 4639 |
Toimitetaan 10 - 12 päivässä
 Adafruit N20 DC-moottori magneettikooderilla - 6V ja välityssuhde 1:100 Toimitetaan 10 - 12 päivässä € 20,25
Adafruit N20 DC-moottori magneettikooderilla - 6V ja välityssuhde 1:100 Toimitetaan 10 - 12 päivässä € 20,25 Asiakkaiden kysymyksiä
asiakkaiden arvostelut
- Vähennetty Varastossa -49 % Adafruit Valkoinen LED-taustavalomoduuli - Pieni 12mm x 40mm € 2,85 € 1,45 Katso tuote
- Vähennetty Varastossa -50 % Adafruit JST-PH 2-nastainen SMT Oikeakulmainen Breakout Board € 2,20 € 1,10 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Minimetallikaiutin langoilla - 8 ohm 0,5W € 2,85 € 1,45 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Pinottavat liittimet Feather-liittimille - 12- ja 16-nastaiset naarasliittimet € 1,80 € 0,90 Katso tuote
- Vähennetty 3 pieces Varastossa -50 % Adafruit LED-filamentti - 3V 26mm pitkä - Lämmin valkoinen 3 kpl € 6,60 € 3,30 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Yksisuuntainen joustava LED-filamentti - 3V 25mm pitkä - Vihreä € 3,65 € 1,85 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Keltainen € 10,85 € 5,40 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Ultimate GPS HAT Raspberry Pi A+/B+/Pi 2/3/4/Pi 5:lle € 43,25 € 21,65 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Vedenpitävä polarisoitu 4-johtiminen kaapelisarja € 3,60 € 1,80 Katso tuote
- Vähennetty Varastossa -50 % Adafruit IR-sädetunnistin premium-johtoliittimillä - 5 mm:n LEDit € 8,60 € 4,30 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Kaiutin - 3" Halkaisija - 4 Ohm 3 Watt € 2,85 € 1,45 Katso tuote
- Vähennetty Varastossa -49 % Adafruit Vedenpitävä DC-virtajohtosarja - 5,5/2,1 mm € 3,65 € 1,85 Katso tuote
- Vähennetty Varastossa -50 % Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Punainen € 10,85 € 5,45 Katso tuote
- Vähennetty Varastossa -50 % Adafruit Kudottu johtava kangas - 20 cm neliö € 7,15 € 3,60 Katso tuote
- Vähennetty 10 pieces Varastossa -50 % Adafruit Break-away 0,1" 36-nastainen nauhallinen urosotsikko - Rainbow Combo 10 Pack € 7,15 € 3,60 Katso tuote