









Adafruit LSM6DS33 + LIS3MDL - 9 DoF IMU kiihdytyksellä / gyroskoopilla / magneetilla
Kuvaus
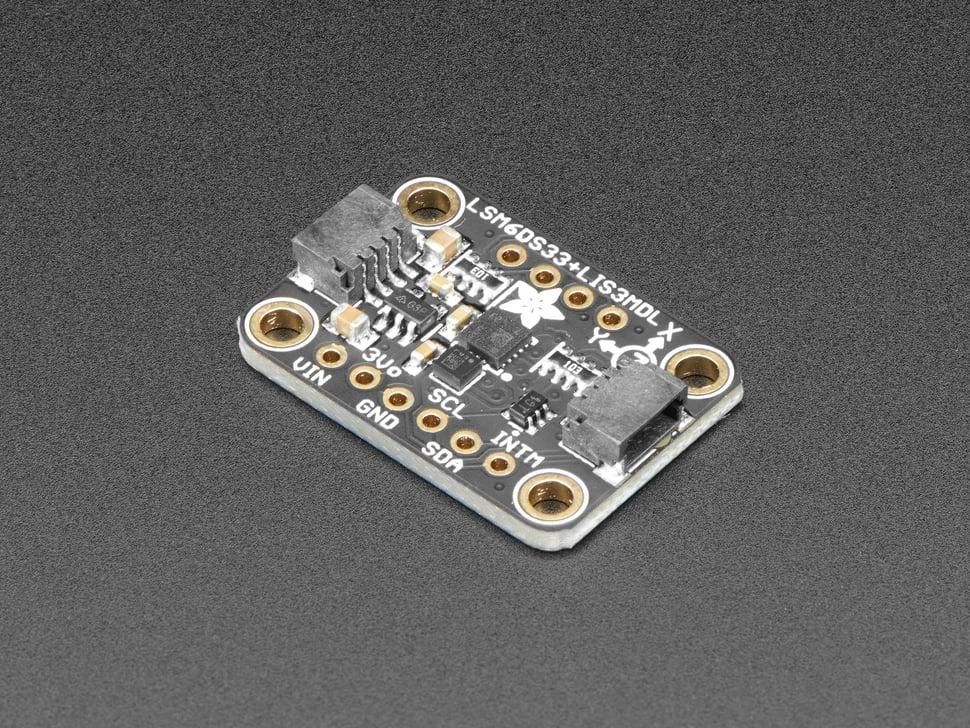
Lisää Arduino -projektiisi liike-, suunta- ja asennontunnistus tällä monipuolisella 9 vapausasteen (9-DoF) anturilla, jossa on ST-anturit. Tämä kompakti breakout-piiri yhdistää LSM6DS33-kiihtyvyysanturin ja gyroskoopin sekä LIS3MDL-magnetometrin, tarjoten kattavan liikedatan käsittelyn.
LSM6DS33 sisältää kolmiakselisen kiihtyvyysanturin gravitaatiosuunnan ja -kiihtyvyyden mittaamiseen sekä kolmiakselisen gyroskoopin spinin ja kiertymän havaitsemiseen. Yhdessä LIS3MDL:n kolmiakselisen magnetometrin kanssa se tunnistaa magneettiset voimat tarkasti orientointitehtäviä varten.
Breakout-kortti tukee helppoa liitettävyyttä 3 V:n tai 5 V:n laitteisiin integroimalla I2C-liitännän ja tasosiirretyt tulot. Pika-aloituspainikkeet STEMMA QT -liittimet mahdollistavat saumattoman integroinnin mikrokontrolleriin, kuten STM32F405 Featheriin, plug-and-play-kaapeleiden avulla.
Mukautettavien I2C-osoitteiden ansiosta voit käyttää kahta anturilevyä yhdessä väylässä. Se sisältää täysin testatun kokoonpanon, jossa on lisäliittimet koekytkentälevyä varten ja kiinnitysreiät turvallisia liitäntöjä varten. Monipuolisen ohjelmistotuen, kuten Adafruit ja ST-kirjastojen, ansiosta tämän anturin integrointi Arduino /C++-projekteihisi on vaivatonta.
Ominaisuudet
| Brändi | Adafruit |
| Malli | 4485 |
ETA ei ole tiedossa
 Adafruit LSM6DS33 + LIS3MDL - 9 DoF IMU kiihdytyksellä / gyroskoopilla / magneetilla € 25,45
Adafruit LSM6DS33 + LIS3MDL - 9 DoF IMU kiihdytyksellä / gyroskoopilla / magneetilla € 25,45 Asiakkaiden kysymyksiä
asiakkaiden arvostelut
- Varastossa Adafruit Valkoinen LED-taustavalomoduuli - Medium 23mm x 75mm € 3,40 Katso tuote
- Varastossa Adafruit Vedenpitävä DC-virtajohtosarja - 5,5/2,1 mm € 3,40 Katso tuote
- Varastossa Adafruit Leikkauslevyystävällinen SPDT-liukukytkin € 1,30 Katso tuote
- Varastossa Adafruit Pieni koteloitu piezo langoilla € 1,30 Katso tuote
- Varastossa Adafruit Minimetallikaiutin langoilla - 8 ohm 0,5W € 2,60 Katso tuote
- Varastossa Adafruit JST PH 2-nastainen kaapeli – urosliitin 200 mm € 1,05 Katso tuote
- Varastossa Adafruit Pieni alligaattoriklipsi urosliittimeen - hyppyjohdinpaketti - 6 kpl € 6,65 Katso tuote
- Varastossa Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Limen vihreä € 9,10 Katso tuote
- Varastossa Adafruit NOOds - Joustava LED-filamentti - 3V 300mm pitkä - Lämmin valkoinen € 6,- Katso tuote
- Varastossa Adafruit Kudottu johtava kangas - 20 cm neliö € 6,50 Katso tuote
- Varastossa Adafruit Yksipäiset nOOdit - 128 mm pitkät joustavat LED-filamentit - Sininen 3V € 5,20 Katso tuote
- Varastossa Adafruit Micro Lipo - USB LiIon/LiPoly -laturi € 7,80 Katso tuote
- 5 pieces Varastossa Adafruit NeoPixel Diffused 5 mm läpireikä-LED - 5 kpl € 6,50 Katso tuote
- Varastossa Adafruit Stereokaiutinsarja - 3W 4 Ohm € 9,60 Katso tuote
- Varastossa Adafruit bq25185 USB / DC / aurinkolaturi 3,3 V:n Buck-kortilla € 11,70 Katso tuote
Viimeksi katsotut tuotteet
- Adafruit LSM6DS33 + LIS3MDL - 9 DoF IMU kiihdytyksellä / gyroskoopilla / magneetilla € 25,45 Katso tuote
- Adafruit Hajautettu 'Piranha' Super-flux RGB (kolmivärinen) LED (10 kpl) € 12,75 Katso tuote
- Adafruit Digitaalinen RGB LED -säänkestävä nauha - LPD8806 x 48 LEDiä 2m € 89,20 Katso tuote
- Adafruit ADG729 Kaksois 1-to-4 Analoginen Matriisikytkin € 14,- Katso tuote